Softbot: Autonomous Softball Retrieval Robot
A vision-guided, autonomous sports robot designed and advised from requirements through working hardware. Harvard SEAS senior thesis (Alicia Lael Ayala, S.B. Mechanical Engineering, 2026), covered by the Harvard Gazette.
The problem
Softball practice on a full field (~50,000 sq ft) scatters 200+ balls that take a team of 10 about 15 minutes to collect by hand. A player practicing alone faces an even bigger time sink, and no existing automated solution was designed for softballs on outdoor, uneven terrain.
My role
Technical advisor on the project, Harvard SEAS — involved through every stage from requirements definition to final validation. I brainstormed and worked alongside the team throughout the full design cycle, and specifically designed the drivetrain: motor selection, torque/speed analysis, and shaft and bearing load design.
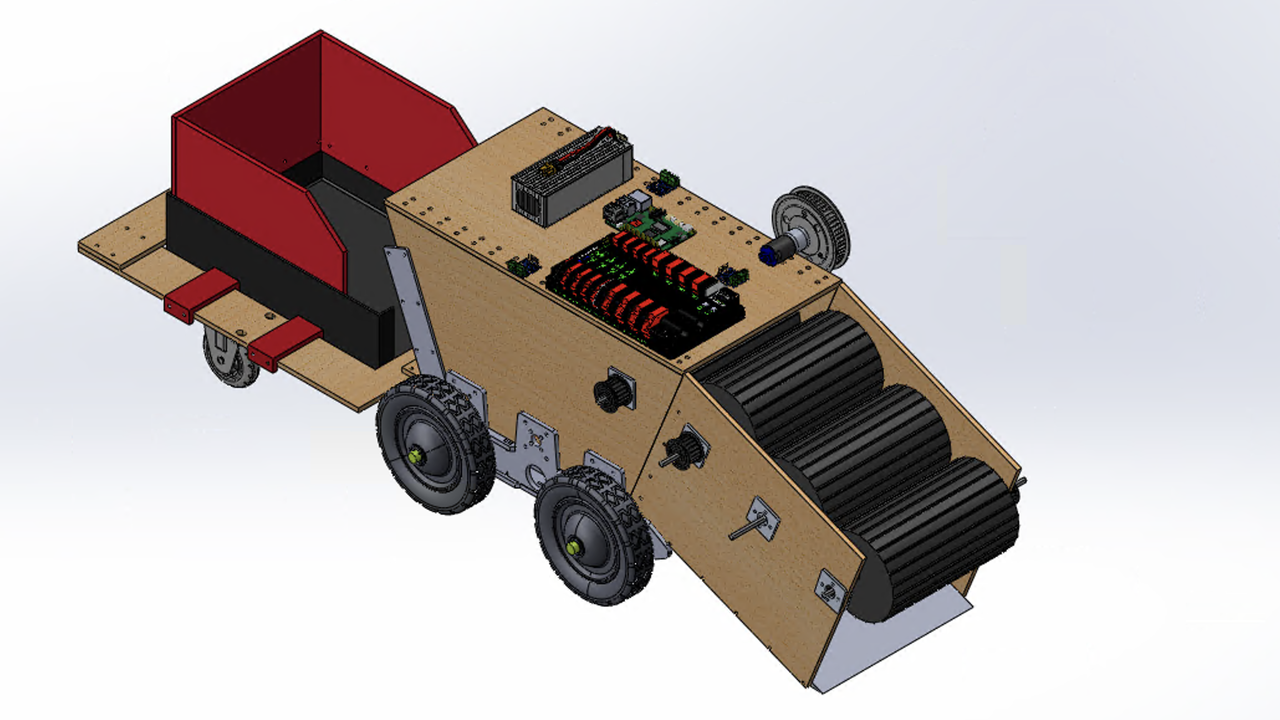
What we built
A fully autonomous robot that uses a camera and YOLO object detection to locate softballs in real time, navigate toward them, and collect them through a custom compliant roller intake. It can also be driven manually over RC.
- Drivetrain: custom motor selection, torque/speed analysis, shaft and bearing load design.
- Intake: two prototype iterations — a 4-wheel concept evaluated against a compliant roller system; the roller was selected for reliability on varied surfaces.
- Autonomy: a Raspberry Pi 5 with a Logitech RGB camera runs YOLO inference and sends serial commands to an Arduino that drives the motor controllers.
- RC mode: manual override through a FlySky RC receiver.
- Storage: onboard collection bin.
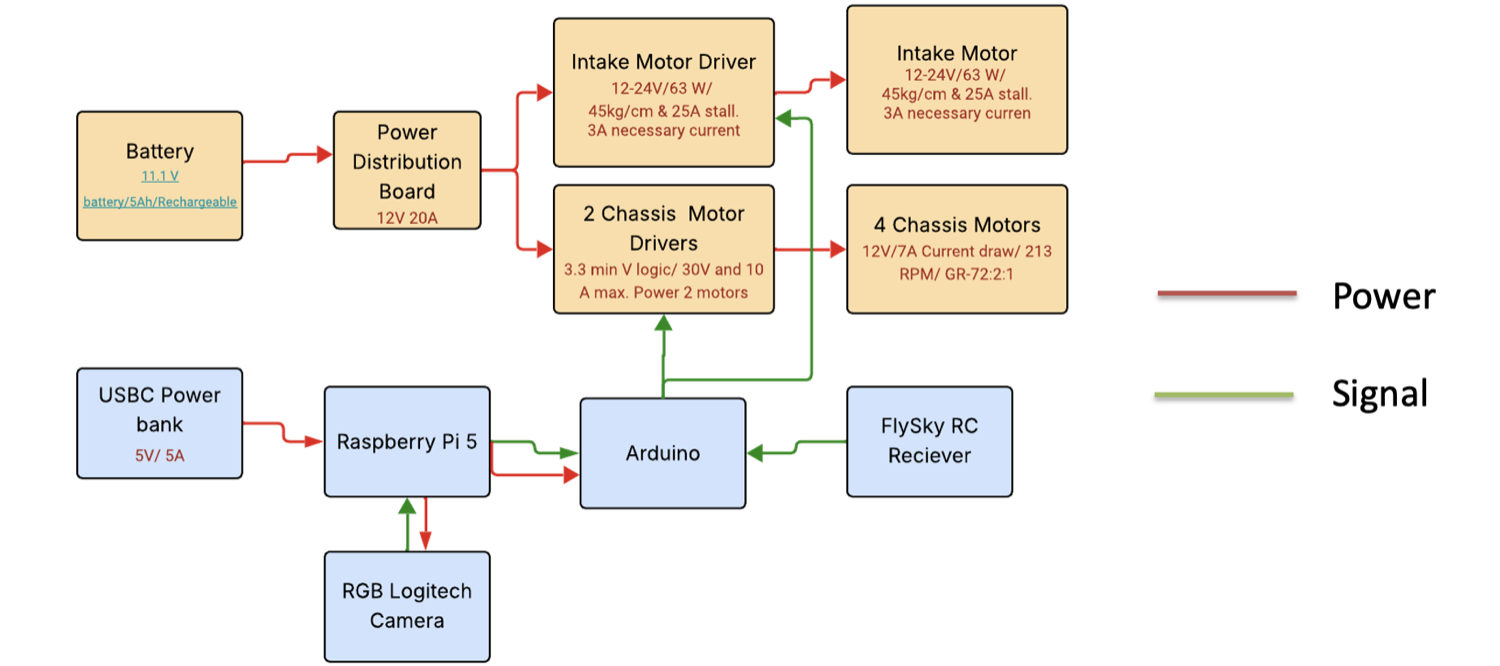
Electronic systems architecture — power paths in red, signal paths in green.
Design process
Concept → competitive analysis (Tennibot, Relox Robotics) → requirements and technical specs → three navigation strategies evaluated → detailed design → motor calculations and bearing analysis → Prototype 1 (1-inch rollers) → Prototype 2 (refined intake) → integrated systems testing → field validation.
Result
A working autonomous robot demonstrated on-field ball collection. The proof-of-concept target was 25 balls in 15 minutes — the equivalent of replacing one teammate — and the system showed strong potential for improving efficiency in practice settings.

Softbot detecting and collecting softballs during a full integration test.
Press
Harvard Gazette, May 2026 — “Need a Time-Saving Robot? Find a Busy Person to Build It.”